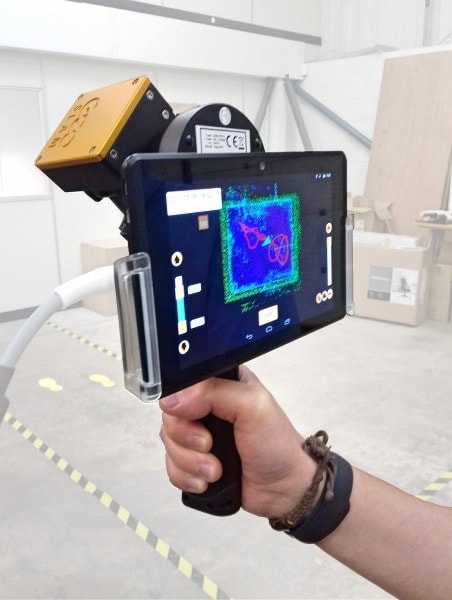
GeoSLAM 3D Scanning: The ZEB-REVO RT
This handheld scanner has the same specifications and properties as the original ZEB-REVO but has one major distinguishing characteristic. This device displays it’s Realtime SLAM results on a tablet or any other device connected through wifi and offers users Realtime point cloud data while they scan in the field. Another feature of the RT is that it includes a feedback function to correct poor scanning results on the go. The one downside for the RT is that it requires a much powerful processor to run Realtime point cloud results and is not equipped to handle certain conditions where as the original ZEB-REVO would.
GeoSLAM Hub Application
The GeoSLAM Hub application makes it possible for full point cloud workflows without having to use a third party software. This application allows users to view results, change parameters and process scans to ensure the best possible scanning results. You can also use the Draw tool to vectorize point cloud data into 2D drawings within the software itself; other features include: 3D modeling, volumetric data, notes, files, and multiple deliverable options.
Combining the ZEB-REVO and Verity
GeoSLAM also developed a beta program to combine the scanning capabilities of the ZEB-REVO and the as-built construction measurement capabilities of ClearEdge’s Verity software. With this combination, GeoSLAM and ClearEdge hope to bring the users a fast and easy to use solution for construction and terrestrial scanning and quality control. To learn more about the INTERGEO Conference, click here. To lear more about GeoSLAM, click here. To learn more about our 3D scanning services and how we can help you with your current or upcoming projects, click here. For any and all of your 3D scanning needs, Arrival 3D has you covered.






